
Россия, Михайловск


СДЕЛАЙТЕ СВОИ УРОКИ ЕЩЁ ЭФФЕКТИВНЕЕ, А ЖИЗНЬ СВОБОДНЕЕ
Благодаря готовым учебным материалам для работы в классе и дистанционно
Скидки до 50 % на комплекты
только до 15.06.2025
Готовые ключевые этапы урока всегда будут у вас под рукой
Организационный момент
Проверка знаний
Объяснение материала
Закрепление изученного
Итоги урока

Была в сети 22.05.2025 13:36

Величкович Светлана Александровна
учитель математики
Местоположение
Специализация
Датчики. Датчик касания.
Категория:
Внеурочка
01.03.2020 13:41

Просмотр содержимого документа
«Датчики. Датчик касания.»

Датчики
Датчик касания
Для подключения датчиков к модулю EV3 предназначены порты, обозначенные цифрами "1", "2", "3" и "4". Таким образом, к одному модулю EV3 одновременно можно подключить до четырех различных датчиков.

- Этот датчик, по сути, представляет собой специальную кнопку, которая может находиться в двух состояниях: "Нажатие" или "Освобождение". Также, последовательный переход в состояние "Нажатие", а затем "Освобождение" называется: "Щелчок" и может обрабатываться программой как самостоятельное событие.
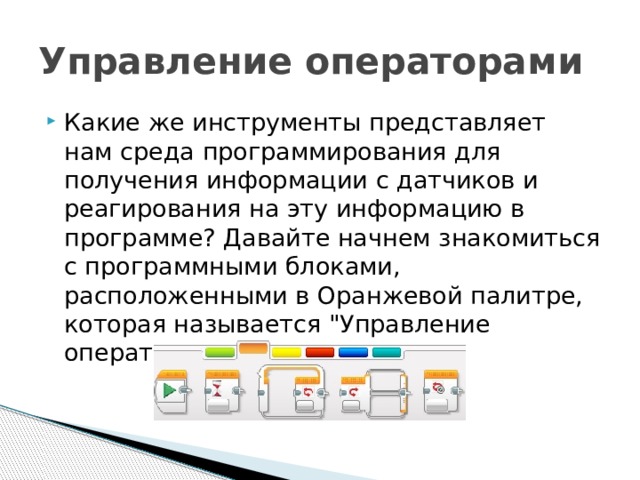
Управление операторами
- Какие же инструменты представляет нам среда программирования для получения информации с датчиков и реагирования на эту информацию в программе? Давайте начнем знакомиться с программными блоками, расположенными в Оранжевой палитре, которая называется "Управление операторами".
- С самым первым блоком Оранжевой палитры мы уже с вами знакомы: он называется "Начало". Именно с него начинаются все программы для роботов.
- Второй программный блок называется "Ожидание". Этот блок заставляет программу ожидать выполнения Третий программный блок называется "Цикл". Этот блок многократно выполняет программные блоки, вложенные внутрь его, пока не будет выполнено условие завершения цикла, заданное в настройках блока.
- Следующий программный блок называется "Переключатель". Он служит для того, чтобы в зависимости от заданных условий - выполнить одну последовательность программных блоков, вложенных в один из своих контейнеров.
- Заключительный программный блок называется "Прерывание цикла". Его предназначение - досрочное прекращение выполнения заданного цикла.
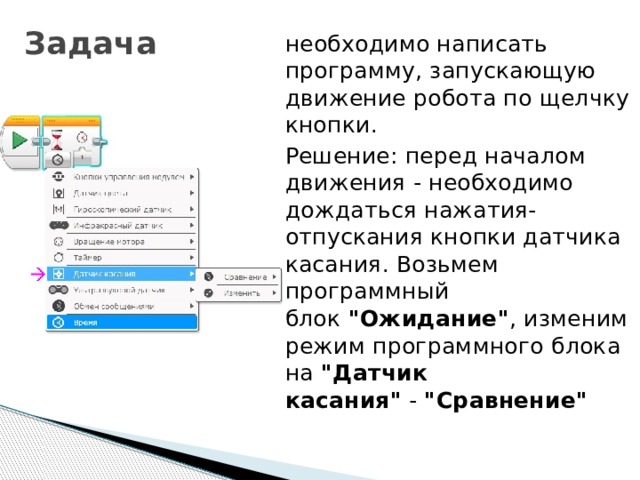
Задача
необходимо написать программу, запускающую движение робота по щелчку кнопки.
Решение: перед началом движения - необходимо дождаться нажатия-отпускания кнопки датчика касания. Возьмем программный блок "Ожидание" , изменим режим программного блока на "Датчик касания" - "Сравнение"

Решение

Задача. Необходимо написать программу, останавливающую робота, столкнувшегося с препятствием.
Получившийся элемент закрепим на передней балке нашего робота и соединим датчик касания с портом "1" модуля EV3.
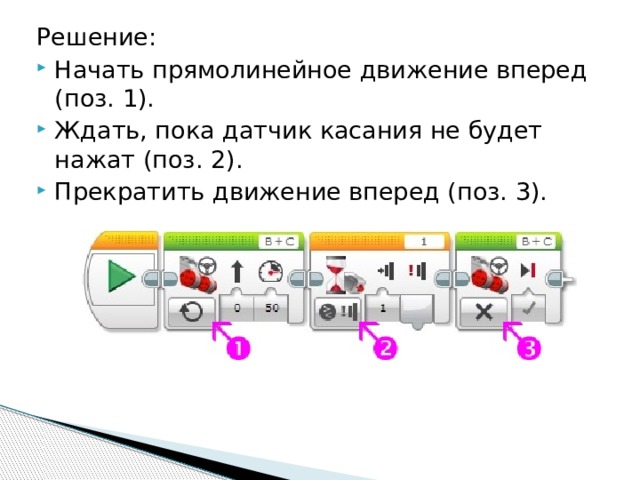
Решение:
- Начать прямолинейное движение вперед (поз. 1).
- Ждать, пока датчик касания не будет нажат (поз. 2).
- Прекратить движение вперед (поз. 3).
Задача
- необходимо написать программу, заставляющую робота двигаться вперед, при наезде на препятствие - отъезжать назад, поворачивать вправо на 90 градусов и продолжать движение вперед до следующего препятствия.
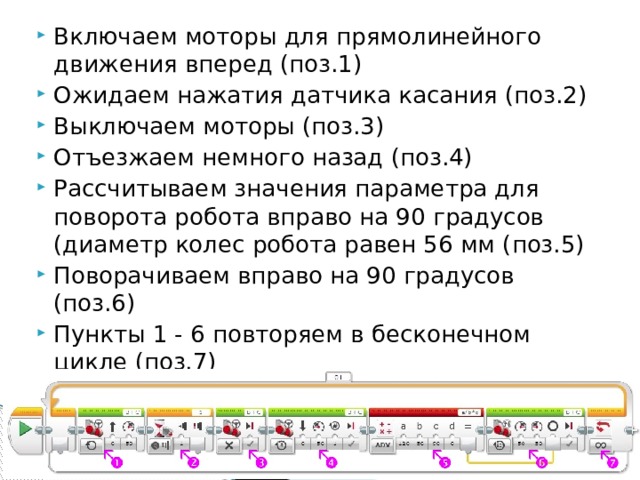
- Включаем моторы для прямолинейного движения вперед (поз.1)
- Ожидаем нажатия датчика касания (поз.2)
- Выключаем моторы (поз.3)
- Отъезжаем немного назад (поз.4)
- Рассчитываем значения параметра для поворота робота вправо на 90 градусов (диаметр колес робота равен 56 мм (поз.5)
- Поворачиваем вправо на 90 градусов (поз.6)
- Пункты 1 - 6 повторяем в бесконечном цикле (поз.7)













Вебинар для учителей

Свидетельство об участии БЕСПЛАТНО!
Полезное для учителя

Реализация образовательных программ осуществляется с применением исключительно электронного обучения и ДОТ





