| Г лава 5. Оптимальная траектория лава 5. Оптимальная траектория
Расчеты и оценки, на которых основывается эта глава, довольно сложны - нужно сделать порядка 30 шагов для получения окончательных результатов. Впрочем, не беспокойтесь, мы опустим почти всю математику и, ограничившись лишь качественными соображениями, сделаем наш анализ настолько простым, насколько это возможно.
Сначала необходимо сделать несколько упрощающих допущений. Мы будем рассматривать изолированные повороты, то есть участки трассы, существующие как бы отдельно от других ее частей. В действительности оптимальная траектория прохождения конкретного поворота зависит от характера трассы до и после него: если после поворота начинается прямолинейный участок, оптимальной будет та кривая, которая дает максимальную скорость на выходе; если повороты следуют один за другим, "выходные" параметры на каждом должны быть оптимальны для входа в следующий. Гонщики-профессионалы, обсуждая конкретную трассу, иногда говорят что-то вроде: "На шестом повороте нужно сделать то-то и то-то для того, чтобы правильно обработать десятый". Иными словами на трассе все взаимосвязано, и профессионалы самой высокой квалификации находят оптимальную траекторию для трассы в целом. В то же время процесс обучения следует начинать с оптимизации прохождения отдельных, изолированных поворотов, переходя затем к двойным и тройным комбинациям. Овладев методикой прохождения нескольких десятков комбинаций из трех поворотов и умея быстро решать задачки для двойных поворотов, можно добиваться очень неплохих результатов в гонках.
Предположение, что оптимальную траекторию прохождения всей гоночной трассы можно точно рассчитать математически, неверно. Огромное количество взаимозависящих параметров делает эту задачу практически неразрешимой, и "алгебра" оставляет место для "гармонии" - наука наукой, а автоспорт, к счастью, пока еще остается искусством.
Еще одно упрощающее предположение заключается в том, что мы будем рассматривать автомобиль, который либо движется с постоянной скоростью, либо тормозит, либо ускоряется, а переход между этими состояниями совершается мгновенно. Таким образом, анализируемые траектории будут состоять из отрезков (или фаз) ускорения, торможения и движения с постоянной скоростью. В реальной жизни автомобиль движется более сложным образом, комбинируя эти состояния движения и плавно переходя от одного к другому. В принципе можно провести анализ траекторий для реального автомобиля, однако при этом объем и сложность математических расчетов выросли бы значительно, а полученные результаты в качественном отношении были бы ненамного богаче. |
| И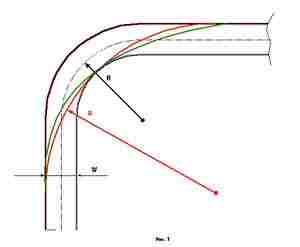 так, на рис. 1 представлен модельный изолированный поворот на 90Ў направо. На самом деле он представляет целое семейство поворотов с заданными значениями ширины трассы W, радиуса R и относительно короткими прямолинейными отрезками на входе и выходе. так, на рис. 1 представлен модельный изолированный поворот на 90Ў направо. На самом деле он представляет целое семейство поворотов с заданными значениями ширины трассы W, радиуса R и относительно короткими прямолинейными отрезками на входе и выходе.
Проведем анализ траекторий для конкретного поворота с радиусом 25 м при ширине трассы 10 м, а затем исследуем зависимость результатов от R и W. Автомобиль при этом будем считать "материальной точкой", то есть телом с размерами много меньшими, чем R и W. На самом деле это, конечно, не так - ширина и длина машины сравнимы с шириной трассы и радиусом поворота, но мы не будем рассматривать траектории движения отдельных колес автомобиля, а под шириной трассы W будем понимать ее "эффективное" значение, которое, по понятным соображениям, меньше геометрической ширины дороги на ширину машины.
Из предыдущей статьи мы знаем, что для заданной величины центростремительного (не центробежного!) ускорения максимально допустимая скорость движения по окружности возрастает пропорционально корню квадратному из ее радиуса. Таким образом, если мы будем двигаться через наш поворот по траектории, представляющей собой отрезок окружности с наибольшим возможным радиусом, начинающейся в наиболее удаленной от центра поворота точке входного прямолинейного отрезка, проходящей в центре поворота вплотную к внутренней бровке и заканчивающейся во внешней точке выходной прямой, то допустимая скорость будет максимальной. Эта траектория показана на рисунке красным цветом и является несколько упрощенным вариантом классической оптимальной траектории движения в повороте (зеленая), которая найдена главным образом опытным путем и является криволинейной. Классическая траектория касается внутренней бровки не в геометрическом центре поворота, а несколько за ним, поскольку учитывается необходимость набора скорости на выходе из поворота и, следовательно, движения по кривой с постоянно возрастающим радиусом. Соответственно, на входном участке радиус уменьшается, так как автомобиль движется с замедлением. Исходя из сделанных упрощающих допущений, мы продолжим анализ геометрической (красной) траектории потому, что это проще, а результаты достаточно близки к реальной жизни.
На рисунке показаны еще две возможные траектории - назовем их внутренней и внешней. Внутренняя (серая) проходит по внутренней стороне входного и выходного отрезков, а внутри поворота жмется к внутренней бровке. Внешняя (коричневая) - наоборот - везде идет на максимальном удалении от центра поворота.
На первый взгляд, серая траектория имеет преимущества перед красной - она короче и, хотя по красной можно двигаться быстрее, чем по криволинейному участку серой, за счет разницы в длине пути можно получить выигрыш во времени. Кроме того, на прямолинейных участках внутренней траектории (на входе и на выходе) можно двигаться с ускорением, а оптимальную красную нужно проходить с постоянной скоростью.
Ну что ж, пусть рассудит наука. Вычислим время движения по красной и серой траекториям (коричневую - внешнюю - мы изобразили лишь для полноты картины: она заведомо хуже других, так как длиннее и допускает меньшую скорость движения на криволинейном участке по сравнению с оптимальной).
Предположим, что покрышки автомобиля и состояние поверхности дороги в состоянии обеспечить величину центростремительного ускорения 1,1 g (более или менее типичное значение для гоночной, но не формульной резины). Значения максимальной скорости для криволинейных отрезков внутренней, оптимальной и внешней траекторий определяются формулой: Красная траектория - это окружность постоянного радиуса, величина которого определяется из геометрии как R + 2,9W = 54 м. Соответственно скорость движения равна 86,9 км/час, а время прохождения траектории - 3,51 секунды. Допустимая скорость движения по криволинейному участку внутренней траектории (его радиус меньше R на половину W) равна 52,9 км/час, так что на входном прямолинейном отрезке мы сначала ускоряемся, затем снижаем скорость до допустимой величины.
Чтобы сравнение было справедливым, предположим, что движение по серой линии мы начинаем с той же скоростью, с какой должны двигаться по красной - 86,9 км/час (и с той же скоростью покидаем поворот). Примем также, что на прямолинейных участках мы можем увеличивать скорость с ускорением 1,1 g. В этом случае план прохождения поворота по внутренней траектории можно представить графиком скорости, показанным серой линией на рис. 2.
Возможность движения с ускорением позволяет нам в начале прямолинейного участка показать результат лучше, чем при движении с постоянной скоростью по оптимальной траектории, однако затем мы должны довольно резко тормозить, чтобы на циркулярный отрезок выйти со скоростью 52,9 км/час. Наконец, на выходном прямолинейном участке мы тоже будем двигаться с максимально возможным ускорением, и конечная скорость на выходе превысит ту, с которой можно пройти поворот по красной траектории. Впрочем, нас интересует не скорость, а время. |
| С ерый график на рис. 2 позволяет вычислить время движения по внутренней траектории - 4,49 секунды, на 0,98 секунды больше, чем при движении по оптимальной (расчеты довольно муторные, и мы их не приводим). Потерять почти секунду на всей трассе было бы не стыдно, но на одном типовом повороте - это чересчур. ерый график на рис. 2 позволяет вычислить время движения по внутренней траектории - 4,49 секунды, на 0,98 секунды больше, чем при движении по оптимальной (расчеты довольно муторные, и мы их не приводим). Потерять почти секунду на всей трассе было бы не стыдно, но на одном типовом повороте - это чересчур.
Выбор серой внутренней траектории - катастрофическая ошибка. То же можно сказать о внешней траектории - там результат еще на 0,2 секунды хуже.
Теперь посмотрим, что будет происходить, если геометрические параметры поворота (радиус R и ширина W) будут меняться. В таб. 1 представлены результаты вычисления времени движения по оптимальной и внутренней траекториям для различных значений радиуса при постоянной эффективной ширине W = 10 м. Видно, что с увеличением радиуса разность времени движения по красной и серой траекториям постепенно уменьшается. Эта тенденция интуитивно понятна, так как с ростом радиуса ширина поворота составляет все меньшую его долю и влияние эффекта "спрямления" становится меньше.
В таб. 2 приведены результаты расчета времени движения по оптимальной и внутренней траекториям для поворотов различной ширины и одинакового радиуса R = 25 м. Здесь также проявляется интуитивно понятная тенденция - эффект спрямления более значителен на широких поворотах. Отметим одно замечательное обстоятельство: уже при ширине трассы 1 м (напомним, что это эффективная ширина, за вычетом ширины автомобиля) оптимальная траектория дает выигрыш в 0,13 секунды по сравнению с внутренней!
Подведем итоги. При сделанных нами допущениях оптимальная (красная) траектория движения в повороте всегда лучше других, но это при условии движения с постоянной скоростью. Если это условие отбросить, то наиболее выигрышной кривой окажется та, которую мы назвали классической и изобразили на рис. 1 зеленым цветом. Нахождение точной формы классической траектории является достаточно сложной задачей и требует применения соответствующего математического аппарата - вариационного анализа. Кстати, именно этот метод в сильно упрощенном виде мы сегодня использовали и получили с его помощью полезные результаты.
Следующую статью мы посвятим анализу связи между мощностью, развиваемой двигателем автомобиля, и его скоростью.
Таблица 1. Полное время движения (сек.) по оптимальной и внутренней траекториямв зависимости от радиуса поворота Радиус поворота (м) Оптимальная траектория Внутренняя траектория
20 3,35 4,34
25 3,51 4,49
30 3,67 4,56
35 3,82 4,67
40 3,97 4,78 Таблица 2. Полное время движения (сек.) по оптимальной и внутренней траекториямв зависимости от ширины трассы Ширина трассы (м) Оптимальная траектория Внутренняя траектория
1 2,52 2,65
3 2,78 3,17
5 3,00 3,64
10 3,51 4,49
15 3,96 5,08
|
















