|
|
| В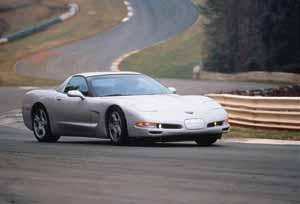 5-й главе нашей серии мы выяснили, что даже небольшая ошибка в выборе траектории движения в повороте может привести к существенной потере времени. При ширине автомобиля около 2 м и трассы порядка 5 м время прохождения отдельного 90-градусного поворота по различным траекториям может различаться на несколько десятых долей секунды. В сегодняшней статье мы продолжим анализ этого вопроса, включив в рассмотрение также и участок прямой, следующий за поворотом. 5-й главе нашей серии мы выяснили, что даже небольшая ошибка в выборе траектории движения в повороте может привести к существенной потере времени. При ширине автомобиля около 2 м и трассы порядка 5 м время прохождения отдельного 90-градусного поворота по различным траекториям может различаться на несколько десятых долей секунды. В сегодняшней статье мы продолжим анализ этого вопроса, включив в рассмотрение также и участок прямой, следующий за поворотом.
Глава 8. Движение по прямой
Гонщики говорят, что самый важный поворот на трассе - это тот, за которым следует самый длинный прямой участок. Чтобы выяснить, насколько правильно это утверждение, мы вычислим время прохождения прямолинейного участка трассы в зависимости от скорости движения на входе в него. Результаты, хотя и не слишком впечатляющие, помогут нам уточнить математическую модель движения автомобиля и существенно продвинуться в вопросе о том, как следует выбирать траекторию движения по трассе в целом.
Математическая модель, описывающая движение автомобиля на прямолинейном участке дороги, основывается на 2-м законе Ньютона: |
| ( 1) 1)
где F - сила, действующая на автомобиль; m - масса и a - ускорение машины. Нам необходимо решить это уравнение таким образом, чтобы получить зависимость времени движения от пройденного пути. Легко видеть, что ни время, ни путь в уравнение (1) в явном виде не входят, однако, вспомнив, что ускорение есть изменение скорости в единицу времени, а скорость - отношение пути ко времени, за которое он пройден, можно предположить, что необходимые нам результаты получить все же можно. Это действительно так. Будем рассматривать малые промежутки времени |
| , в течение которых ускорение можно считать постоянным. Тогда по определению ускорения получим формулу, которая позволит вычислить значение скорости в конце этого промежутка Vк, если известна ее величина в начале Vн: в течение которых ускорение можно считать постоянным. Тогда по определению ускорения получим формулу, которая позволит вычислить значение скорости в конце этого промежутка Vк, если известна ее величина в начале Vн: |
| ( 2) 2)
Из определения скорости получим аналогичную формулу пройденного автомобилем пути: |
| ( 3) 3)
Физики говорят, что формулы (2) и (3) задают схему интегрирования (решения) уравнения (1), которое называют также уравнением движения. Сам процесс вычислений мы, разумеется, опустим, так как он довольно утомителен и не дает новой информации, которая способствовала бы углублению понимания физики движения автомобиля. Целью расчетов является табличка, связывающая время движения и пройденный путь для конкретного автомобиля. Однако стоп, в последних словах - конкретный автомобиль - заключен важный смысл. Действительно: мощность и крутящий момент двигателя, масса автомобиля, коэффициент аэродинамического сопротивления и другие его параметры (передаточные числа трансмиссии, например) существенным образом определяют, как этот автомобиль будет двигаться. |
| Г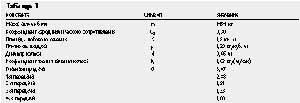 де же место всем этим факторам в приведенных выше формулах? Конечно же, они задают значение силы F, действующей на автомобиль в каждый момент времени. Вычисление величины силы, разумеется, приближенное, к которому мы сейчас приступим, связано с необходимостью учета важности тех или иных физических явлений и является по сути математическим моделированием движения автомобиля. де же место всем этим факторам в приведенных выше формулах? Конечно же, они задают значение силы F, действующей на автомобиль в каждый момент времени. Вычисление величины силы, разумеется, приближенное, к которому мы сейчас приступим, связано с необходимостью учета важности тех или иных физических явлений и является по сути математическим моделированием движения автомобиля.
Для начала определим некоторые константы (постоянные величины), причем, как и раньше, в качестве подопытного автомобиля мы возьмем наш любимый Chevrolet Corvette. Основные параметры этого автомобиля приведены в таблице 1. |
| В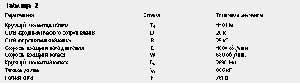 таблице 2 приведены те переменные величины, которыми мы будем пользоваться. таблице 2 приведены те переменные величины, которыми мы будем пользоваться.
Основное уравнение, необходимое для построения математической модели движения автомобиля по прямой с переменным ускорением, выглядит следующим образом: |
| ( 4) 4)
причем сила аэродинамического сопротивления D, как мы показали в главе 6, определяется по формуле: |
| ( 5) 5)
Силу сопротивления качению R будем считать приблизительно пропорциональной величине скорости: |
| ( 6) 6)
В этом допущении, возможно, самое слабое место наших рассуждений - формула (6) получена из анализа того факта (приведенного в техническом руководстве по Corvette), что для движения со скоростью около 80 км/час требуется мощность порядка 8 л. с. При такой скорости аэродинамическое сопротивление мало и вся мощность расходуется на преодоление сил сопротивления качению. |
| Т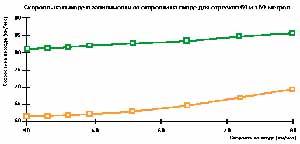 еперь, наконец, займемся тяговым усилием Fw, действующим на автомобиль со стороны поверхности дороги и равным по 3-му закону Ньютона силе, с которой колесо толкает назад землю: еперь, наконец, займемся тяговым усилием Fw, действующим на автомобиль со стороны поверхности дороги и равным по 3-му закону Ньютона силе, с которой колесо толкает назад землю: |
| ( 7) 7)
В этой формуле Gn - произведение передаточных чисел главной передачи и той, которая используется в данный момент, так что она просто показывает, что тяговое усилие равно крутящему моменту двигателя, умноженному на полное передаточное число всей трансмиссии и деленному на радиус колеса. Для расчета тяговой силы необходимо решить, какую именно передачу следует использовать в данный момент. Здесь можно использовать следующую логику рассуждений - по скорости движения автомобиля V определим скорость вращения колеса как: |
| ( 8) 8)
Соответственно скорость вращения вала двигателя будет равна |
| ( 9) 9)
В каждый конкретный момент времени можно вычислить значение E и определить, соответствует ли оно величине, при которой крутящий момент максимален. Если E выше оптимальной величины, следует, если возможно, перейти на повышенную передачу. С некоторой натяжкой будем считать, что крутящий момент двигателя максимален при 4200 об./мин. Для простоты примем также, что двигатель нашего Corvette выдает постоянный момент, равный 440 Нм. Более точные расчеты потребовали бы учета зависимости крутящего момента от скорости вращения, задаваемой некоторой экспериментальной кривой, приводимой в справочниках, однако наши упрощения вполне разумны и приведут лишь к тому, что полученные результаты будут отличаться от точных расчетов немного повышенной оптимистичностью. |
| И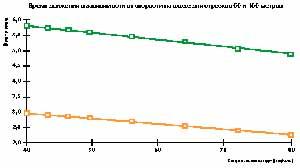 так, у нас есть все необходимое для того, чтобы вычислить, сколько времени потребуется Chevrolet Corvette для преодоления прямолинейного участка трассы заданной длины в зависимости от скорости в его начале. Сложная взаимосвязь физических величин, входящих в приведенные выше формулы, затрудняет проведение расчетов вручную, так что доверим их компьютерной программе и займемся анализом результатов. так, у нас есть все необходимое для того, чтобы вычислить, сколько времени потребуется Chevrolet Corvette для преодоления прямолинейного участка трассы заданной длины в зависимости от скорости в его начале. Сложная взаимосвязь физических величин, входящих в приведенные выше формулы, затрудняет проведение расчетов вручную, так что доверим их компьютерной программе и займемся анализом результатов. |
| В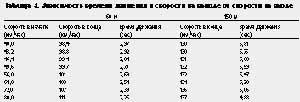 таблице 3 показана зависимость времени движения и скорости на выходе от скорости на входе прямолинейных участков длиной 60 и 150 метров. таблице 3 показана зависимость времени движения и скорости на выходе от скорости на входе прямолинейных участков длиной 60 и 150 метров.
Для наглядности те же зависимости в графической форме показаны на рисунках. Обратим внимание на некоторые интересные обстоятельства.
Разница во времени движения по 60-метровой прямой при скорости на входе 40 и 43,2 км/час составляет всего 0,05 секунды. Это значительно меньше, чем ожидалось бы интуитивно. Разность скоростей на выходе не превосходит 13 км/час при изменении начальной скорости от 40 до 80 - это говорит о том, что на больших скоростях большая часть мощности расходуется на преодоление сил трения. Это также является следствием того, что при 40 км/час в нашем распоряжении имеется значительно большее тяговое усилие за счет использования пониженных передач и на относительно коротком участке длиной 60 м большое ускорение в начале является решающим. В действительности на более длинном 150-метровом отрезке разность значений выходной скорости не превосходит даже 8 км/час, а время движения отличается почти на целую секунду.
Для автомобиля с меньшим крутящим моментом результаты были бы более впечатляющими. В случае Corvette с его 440 Нм наказание за выход на прямолинейный участок со скоростью меньшей, чем следовало бы, не столь велико, как было бы в случае с автомобилем с меньшим моментом, когда скорость, потерянную в результате неправильного прохождения поворота или по застенчивости, очень трудно восполнить. |